


Workshops
Do you want to get started with robotics in your school? Do you want to upgrade your skills or give your students new challenges? Damien offers a variety of engaging and educational incursions for students, as well as relevant and practical Professional Development for teachers.
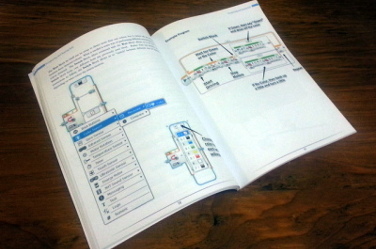
Books
Damien is the author of multiple Teacher Resource Books. These books are designed to give novice teachers the materials and confidence to successfully implement a robotics program within their school.

Teacher Resources
A collection of Classroom resources for teaching robotics at your school
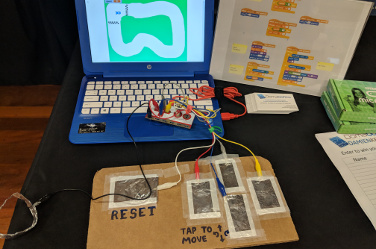
Latest Projects
Outside of my workshops and consulting, I tinker with a wide variety of Robots, Software and Electronics. Come and find out what I've been up to lately.